Top robotics dissertation in graduating year.
Ball and socket joints in robot shoulder and hip joints pose challenges in sensing accurate joint orientation due to their three-axis rotations. Accurate joint orientation is crucial for robots to have spatial awareness and interact effectively with their environment.
This dissertation presents a novel three-degree-of-freedom spherical joint with an absolute position sensing system. The goal is to create a simple, low-cost, and durable system for accurately determining the absolute position of a spherical joint, suitable for humanoid shoulder or hip joints. The proposed system utilizes multiple three-light patterns embedded in the joint’s reachable workspace, making it viable for mass production and easy to implement in robotic systems.
The spherical joint incorporates triangular light patterns embedded at various positions within the socket. A camera within the ball of the joint captures the light pattern positions in the socket as the joint moves. The camera utilizes a 180-degree fisheye lens with an equi-solid/equidistant mapping function.
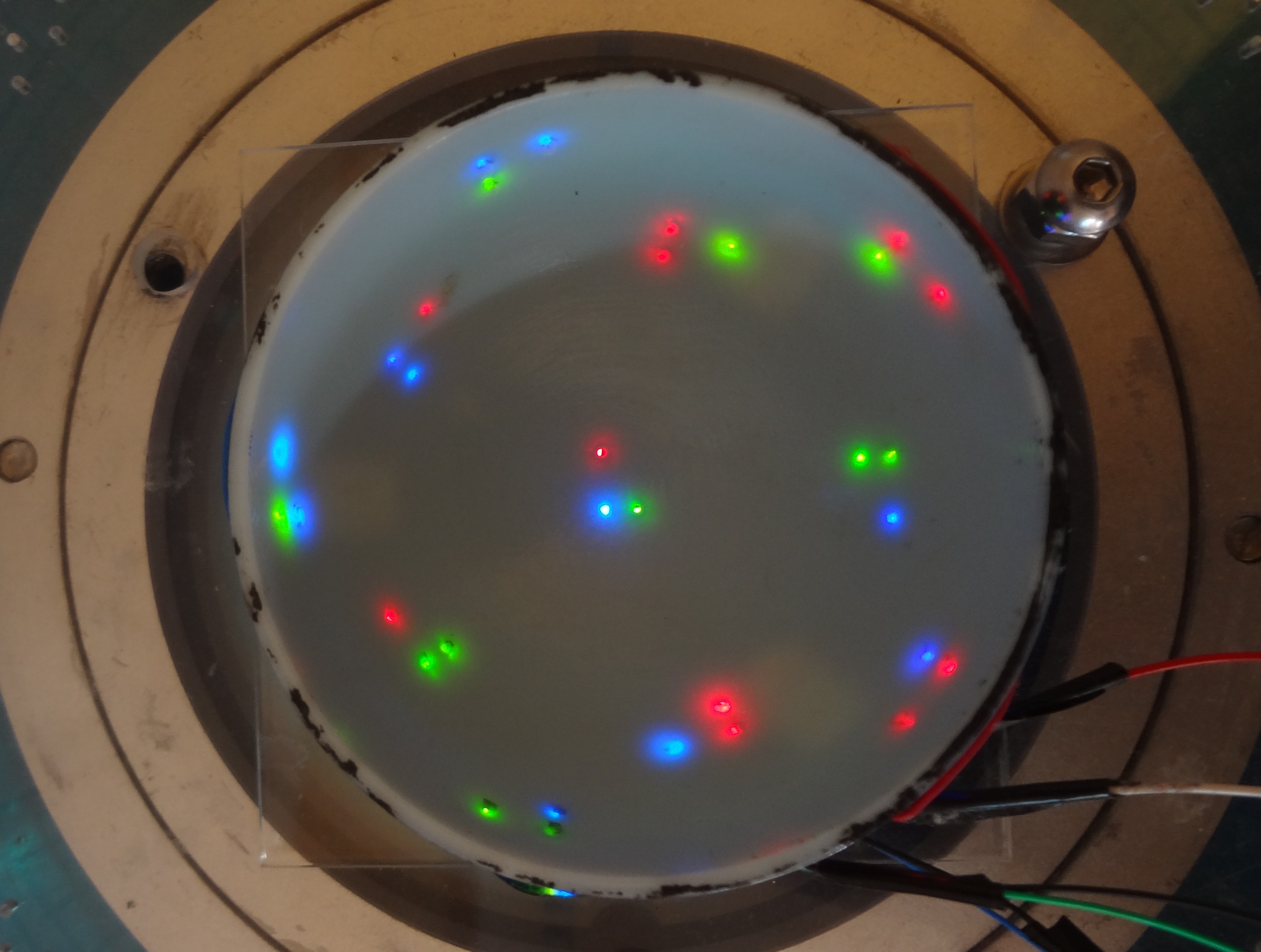
Light patterns embedded in socket

Camera embedded in ball joint
Computer vision algorithms use the light pattern positions to calculate the ZYZ Euler angles of rotation of the joint, enabling precise measurement of joint positional data using incline/azimuth/twist naming conventions.